If you wish to contribute or participate in the discussions about articles you are invited to contact the Editor
Carrier Phase Ambiguity Fixing: Difference between revisions
Carlos.Lopez (talk | contribs) No edit summary |
Carlos.Lopez (talk | contribs) No edit summary |
||
| Line 85: | Line 85: | ||
[[Category:Fundamentals]] | [[Category:Fundamentals]] | ||
[[Category:Solving Navigation Equations]] | |||
Revision as of 08:15, 9 August 2011
| Fundamentals | |
|---|---|
| Title | Carrier Phase Ambiguity Fixing |
| Author(s) | J. Sanz Subirana, JM. Juan Zornoza and M. Hernandez-Pajares, University of Catalunia, Spain. |
| Level | Medium |
| Year of Publication | 2011 |

The carrier phase measurements are much more precise than the code pseudorange measurements (typically, about two orders of magnitude), but they contain the unknown ambiguities (B), (see Linear observation model for PPP). If such ambiguities are fixed, thence the carrier phase measurements become as unambiguous pseudoranges, but accurate at the level of few millimetres.
Double differenced ambiguity fixing
In this article the carrier ambiguities will be considered in double differences between pairs of receivers and satellites. This is done in order to cancel out the fractional part of the ambiguities ([math]\displaystyle{ b_{rec} }[/math], [math]\displaystyle{ b^{sat} }[/math]), being the remaining ambiguities integer number of wavelengths. That is, given
- [math]\displaystyle{ B_{rec}^{sat}=\lambda \,N_{rec}^{sat}+b_{rec}+b^{sat} \qquad \mbox{(1)} }[/math]
the double differences, regarding to a reference receiver and satellite, yield:
- [math]\displaystyle{ \Delta \nabla B_{rec}^{sat}=B_{rec}^{sat}-B_{{rec}_{_0}}^{sat}-(B_{rec}^{{sat}_{_0}}-B_{{rec}_{_0}}^{{sat}_{_0}})=\lambda \,\Delta \nabla N_{rec}^{sat} \qquad \mbox{(2)} }[/math]
where the satellite and receiver ambiguity terms ([math]\displaystyle{ b_{rec},b^{sat} }[/math]) cancel-out.
Undifferenced Ambiguity Fixing
The double-differenced ambiguities between pairs of satellites and receivers are integer numbers of wavelengths, see equation (2). Indeed, the fractional part cancels in such double-differences.
- [math]\displaystyle{ \nabla \Delta b_{rec}^{sat}=0 \qquad \mbox{(3)} }[/math]
An immediate consequence of previous equation (3) is the split of the fractional part of the ambiguities (for each satellite-receiver arch) in two independent terms, one of them linked only to the receiver and the other only to the satellite.
- [math]\displaystyle{ \nabla \Delta b_{rec}^{sat}=0 \Longleftrightarrow b_{rec}^{sat}=b_{rec}+b^{sat} \qquad \mbox{(4)} }[/math]
Notice that (4) means that fractional parts of the ambiguity ([math]\displaystyle{ b_{rec} }[/math] and [math]\displaystyle{ b^{sat} }[/math]) are not linked to a specific satellite-receiver arc, but [math]\displaystyle{ b^{sat} }[/math] depends only of satellite (and it is common to all carrier measurements of receivers tracking this satellite) and [math]\displaystyle{ b_{rec} }[/math] depends only to the receiver (and it is common to all satellites tracked by a given receiver).
The fractional part of the wide-lane ambiguity can be easily estimated from the Melbourne-Wübbena combination, because it is incorrelated from other parameters in the navigation filter (see figure 1, in blue [footnotes 1]). While the fractional part of the short-lane ambiguity (i.e., [math]\displaystyle{ b_1 }[/math]) can be added to satellite and receiver clock. This approach leads to the so called Phase Clocks [Laurichesse and Mercier, 2007] [1] , which are different of the code clock (i.e., not consistent with the code clock)\footnote{Nevertheless, this is not a critical issue to fix the ambiguities, because the code is used only to initialize the filter (and to help its convergence).}.
Other, more straightforward approach, is to consider such fractional part of ambiguities as Carrier Phase Instrumental Delays [footnotes 2], and to remove them using accurate determinations of such values, computed from a receivers network [Juan et al., 2010] [2]. Indeed, the Carrier Instrumental Delays or fractional part of ambiguities ([math]\displaystyle{ b_{rec} }[/math] and [math]\displaystyle{ b^{sat} }[/math]) can be estimated from a global network of permanent stations, after fixing the double-differenced ambiguities [math]\displaystyle{ \nabla \Delta B_{rec}^{sat}=\lambda\, \nabla \Delta N_{rec}^{sat} }[/math] between satellites and receivers. As it is shown in figure 1theses estimates are stable enough to be broadcast to the users as low varying parameters.
Figure 1: Fractional part of ambiguities for GPS satellite PRN19 (left) and receiver MOBN (right). The Wide-lane is shown in blue and the [math]\displaystyle{ L1 }[/math] in red. The figures are from \cite{PRODTS:10:JMJ}. Vertical axis is in cycles and horizontal in seconds of day. The pattern in the figures is due to the correlations with the other parameters in the filter, mainly the satellite clocks 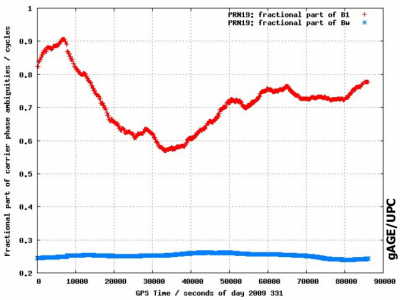
frameless 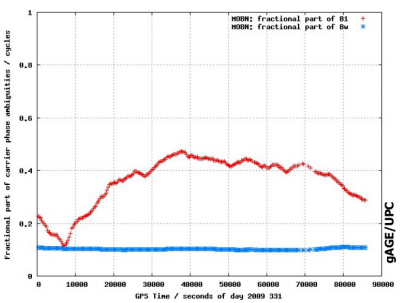
frameless


Thence, having accurate determinations of such parameters, the user can remove this fractional part [footnotes 3] and fix the remaining ambiguity as an integer number. This can be done in a similar way as double differenced mode, but in undifferenced mode; allowing, in this way, to perform real-time ambiguity fixing for PPP, as well.
Notice that, a PPP based ambiguity fixing approach can allow to perform a wold-wide ambiguity fixing, because no baseline limitations applies [footnotes 4], improving the PPP accuracy. Nevertheless, as with the PPP, a large convergence time is required for the filter to start the ambiguity fixing (see Carrier phase ambiguity fixing with two frequencies)
Some works focussing into the undiffrenced (or zero-difference) ambiguity fixing are as follows: [Ge et al., 2008] [3] , [Laurichesse and Mercier, 2007][4], [Collins, 2008] [5],[Banville et al., 2008] [6], [Juan et al., 2010][7], [Hernandez-Pajares et al., 2010] [8] among others.
Notes
- ^ The fractional part of wide-lane (blue) and short-lane (red) fractional ambiguities estimates are shown in the same figure. The large variability seen for the short-lane is due to the correlations with the other parameters in the filter, mainly the clocks.
- ^ To be more precise, the residuals module the carrier wavelength.
- ^ Only the fractional ambiguities for the satellites must be broadcasted to users, because those of the receiver are common for all satellites.
- ^ As in the differential positioning regarding to a reference station (which requires, at least, common view satellites).
References
- ^ [Laurichesse and Mercier, 2007] Laurichesse, D. and Mercier, F., 2007. Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP. Proceedings of 20th Int Tech Meet Satellite Div Inst. Navigation GNSS 2007.
- ^ [Juan et al., 2010] Juan, J., Hernandez-Pajares, M. and Sanz, J., 2010. Precise Real Time Orbit Determination and Time Synchronizatio (PRTODTS). TN2 & TN3: GPS PRTODTS Design and Validation Documents, v0.0. ESA report (ESA ITT AO/1-5823/08/NL/AT), ESOC/ESA, The Netherlands.
- ^ [Ge et al., 2008] Ge, M., Gendt, M., Rothacher, M., Shi, C. and Liu, J., 2008. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. Journal of Geodesy. 82, pp. 389{399.
- ^ [Laurichesse and Mercier, 2007] Laurichesse, D. and Mercier, F., 2007. Integer ambiguity resolution on undi_erenced GPS phase measurements and its application to PPP. Proceedings of 20th Int Tech Meet Satellite Div Inst. Navigation GNSS 2007.
- ^ [Collins, 2008] Collins, P., 2008. Isolating and Estimating Undifferenced GPS Integer Ambiguities. Proceedings Institute of Navigation, National Technical Meeting.
- ^ [Banville et al., 2008] Banville, S., Santerre1, R., Cocard, M. and R.B., L., 2008. Satellite and Receiver Phase Bias Calibration for Undi_erenced Ambiguity Resolution. Proceedings Institute of Navigation, National Technical Meeting.
- ^ [Juan et al., 2010] Juan, J., Hernandez-Pajares, M. and Sanz, J., 2010. Precise Real Time Orbit Determination and Time Synchronizatio (PRTODTS). TN2 & TN3: GPS PRTODTS Design and Validation Documents, v0.0. ESA report (ESA ITT AO/1-5823/08/NL/AT), ESOC/ESA, The Netherlands.
- ^ [Hernandez-Pajares et al., 2010] Hernandez-Pajares, M., Juan, J. and Sanz, J.,2010. Enhanced Precise Point Positioning using Galileo and GPS (EPPP). TN8: Recommendations for a PPP Processing Facility. ESA report (ESA ITT AO/1-5823/08/NL/AT), ESOC/ESA, The Netherlands.