If you wish to contribute or participate in the discussions about articles you are invited to contact the Editor
Klobuchar Ionospheric Model
| Fundamentals | |
|---|---|
| Title | Klobuchar Ionospheric Model |
| Author(s) | J. Sanz Subirana, J.M. Juan Zornoza and M. Hernández-Pajares, Technical University of Catalonia, Spain. |
| Level | Advanced |
| Year of Publication | 2011 |

GPS satellites broadcast the parameters of the Klobuchar ionospheric model for single frequency users. The Klobuchar model was designed to minimise user computational complexity and user computer storage as far as to keep a minimum number of coefficients to transmit on satellite-user link.
This broadcast model is based on an empirical approach [Klobuchar, 1987] [1] and is estimated to reduce about the 50% RMS ionospheric range error worldwide. It is assumed that the electron content is concentrated in a thin layer at [math]\displaystyle{ 350 }[/math] kilometres in height. Thence, the slant delay is computed from the vertical delay at the Ionospheric Pierce Point (IPP) [footnotes 1] multiplying by a obliquity factor, i.e., the mapping function, see figure 1 and equation (9).
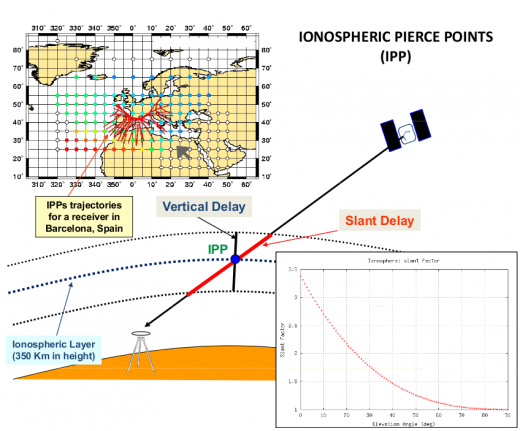
Figure 1: Ionospheric Pierce Points (IPPs), Vertical and Slant delay illustration. The IPP's trajectories for a receiver in Barcelona, Spain are shown in the map. The figure at bottom right shows the obliquity factor variation with the elevation of ray.

Klobuchar Algorithm equations
The Klobuchar algorithm to run in a single frequency receiver is provided as follows (from [Klobuchar, 1987][1]):
Given the user approximate geodetic latitude [math]\displaystyle{ \displaystyle \phi_u }[/math], longitude [math]\displaystyle{ \displaystyle \lambda_u }[/math], elevation angle [math]\displaystyle{ \displaystyle E }[/math] and azimuth [math]\displaystyle{ \displaystyle A }[/math] of the observed satellite and the coefficients [math]\displaystyle{ \displaystyle \alpha_n }[/math] and [math]\displaystyle{ \displaystyle \beta_n }[/math] broadcasted in the GPS satellite navigation message:
- 1. Calculate the earth-centred angle (elevation [math]\displaystyle{ \displaystyle E }[/math] in semicircles).
- [math]\displaystyle{ \psi =\frac{0.0137}{E+0.11}-0.022 \qquad\mbox{(semicircles)} \qquad\mbox{(1)} }[/math]
- Note: All values expressed in semicircles (such as latitudes and longitudes) must be converted to radians before applying trigonometric functions. This conversion is crucial to avoid slight inaccuracies in the computed results. The conversion from semicircles to radians is performed by multiplying the value in semicircles by [math]\displaystyle{ \pi }[/math].
- 2. Compute the latitude of the Ionospheric Pierce Point (IPP)[footnotes 2].
- [math]\displaystyle{ \phi_I=\phi_u+\psi \cos A \qquad\mbox{(semicircles)} \qquad\mbox{(2)} }[/math]
- If [math]\displaystyle{ \displaystyle \Phi_I\gt +0.416 }[/math] the [math]\displaystyle{ \displaystyle \Phi_I=+0.416 }[/math]. If [math]\displaystyle{ \Phi_I\lt -0.416 }[/math] the [math]\displaystyle{ \Phi_I=-0.416 }[/math].
- 3. Compute the longitude of the IPP.
- [math]\displaystyle{ \lambda_I=\lambda_u+\frac{\psi \sin A}{\cos \phi_I} \qquad\mbox{(semicircles)} \qquad\mbox{(3)} }[/math]
- Note: The input longitude values are in the range [0, 2π] (semicircles), not in the common range of [-π, π] (radians).
- 4. Find the geomagnetic latitude of the IPP.
- [math]\displaystyle{ \phi_m=\phi_I+0.064 \, \cos (\lambda_I-1.617) \qquad\mbox{(semicircles)} \qquad\mbox{(4)} }[/math]
- 5. Find the local time t' (in seconds) at the ionospheric pierce point.
- [math]\displaystyle{ t' = (43200 \cdot \lambda_I + t_{\text{GPS}}) \mod 86400 }[/math]
- where:
- [math]\displaystyle{ t_{\text{GPS}} }[/math] is the GPS time in seconds of the week (0 to 604800 s).
- [math]\displaystyle{ \lambda_I }[/math] is the geodetic longitude of the ionospheric pierce point (in semicircles).
- The modulo operation ensures that [math]\displaystyle{ t' }[/math] remains within a 24-hour cycle, which is required for the Klobuchar model to correctly compute the ionospheric delay.
- 6. Compute the amplitude of ionospheric delay.
- [math]\displaystyle{ A_I=\displaystyle\sum_{n=0}^{3}{\alpha_n \phi_m^n} \qquad\mbox{(seconds)} \qquad\mbox{(6)} }[/math]
- if [math]\displaystyle{ A_I\lt 0 }[/math], thence [math]\displaystyle{ A_I=0 }[/math].
- 7. Compute the period of ionospheric delay.
- [math]\displaystyle{ P_I=\displaystyle\sum_{n=0}^{3}{\beta_n \phi_m^n}\qquad\mbox{(seconds)} \qquad\mbox{(7)} }[/math]
- if [math]\displaystyle{ P_I\lt 72\,000 }[/math], thence [math]\displaystyle{ P_I=72\,000 }[/math].
- 8. Compute the phase of ionospheric delay.
- [math]\displaystyle{ X_I=\displaystyle \frac{\displaystyle 2\pi(t-50\,400)}{P_I} \qquad\mbox{(radians)} \qquad\mbox{(8)} }[/math]
- 9. Compute the slant factor (elevation [math]\displaystyle{ E }[/math] in semicircles).
- [math]\displaystyle{ F=1.0+16.0\,(0.53-E)^3 \qquad\mbox{(9)} }[/math]
- 10. Compute the ionospheric time delay.
- [math]\displaystyle{ I_{_{L1_{GPS}}}=\left \{ \begin{array}{ll} \left [5\cdot 10^{-9}+ \sum_{n=0}^{3}{\alpha_n \phi_m^n}\cdot \left ( 1- \frac{X_I^2}{2}+\frac{X_I^4}{24} \right) \right ] \cdot F &; |X_I|\leq 1.57\\[0.5cm] 5\cdot 10^{-9}\cdot F &; |X_I|\geq 1.57 \end{array} \right . \qquad\mbox{(10)} }[/math]
- The delay [math]\displaystyle{ I_{_{L1_{GPS}}} }[/math] is given in seconds and it is referred to the GPS L1 frequency.
- To convert this delay into range units (meters), multiply the ionospheric delay by the speed of light \( c \):
- [math]\displaystyle{ \Delta R = c \cdot I_{L1, GPS} }[/math]
- Where:
- [math]\displaystyle{ \Delta R }[/math] is the ionospheric delay in meters.
- [math]\displaystyle{ c = 299,792,458 }[/math] m/s is the speed of light in vacuum.
- This conversion is essential as the delay is initially calculated in time units (seconds) and must be expressed in distance units (meters) to be used in range calculations.
Although this algorithm is provided to estimate the ionospheric delay in the GPS L1 frequency signal, it can be also used to estimate the ionospheric time delay in the GPS L2 frequency signal or for the GLONASS and Galileo signals, as well. Indeed, taking into account that the ionospheric delay is inversely proportional to the square of the signal frequency, the delay for any GNSS signal transmitted on frequency [math]\displaystyle{ f }[/math] is given by:
- [math]\displaystyle{ I_f= \left ( \frac{f_{_{L1_{GPS}}}}{f} \right )^2\,I_{_{L1_{GPS}}} \qquad\mbox{(12)} }[/math]
Figure 2 is a layout of the Klobuchar model algorithm, showing that the vertical delays are based on a constant value at night time and a half-cosine function in daytime, which amplitude and period are given as a function of the eight parameters ([math]\displaystyle{ \alpha_i,\, \beta_i,\,i=0,\dots,3 }[/math]) broadcast in the GPS navigation message. A map with the geographical variation of the vertical delay is also depicted in this figure.
Figure 3 illustrates with an example the values of the GPS delays from the Klobuchar model and shows the effect of neglecting such delays in single point positioning for the horizontal and vertical error components.
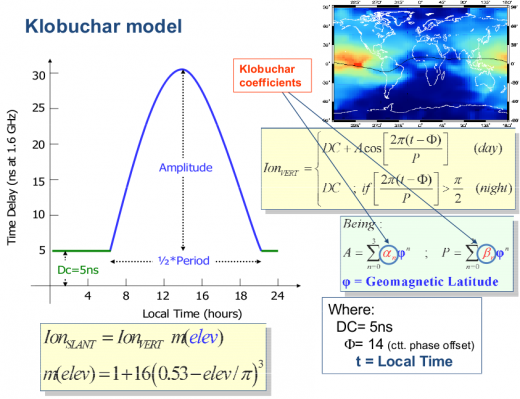
Figure 2: Klobuchar ionospheric model. Algorithm layout.

Figure 3: Ionospheric correction: Range and position domain effect 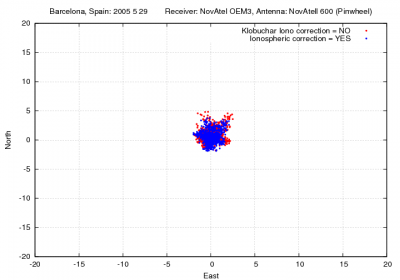
frameless 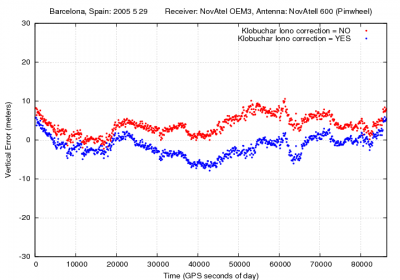
frameless 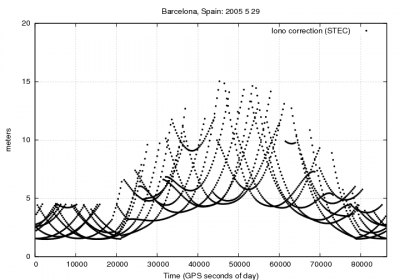
frameless First row shows the horizontal (left) and vertical (right) positioning error using (blue) or not using (red) the Klobuchar ionospheric correction defined in 1. The variation in range is shown in the second row at left



Notes