If you wish to contribute or participate in the discussions about articles you are invited to contact the Editor
Carrier phase ambiguity fixing with two frequencies: Difference between revisions
Jump to navigation
Jump to search
Jaume.Sanz (talk | contribs) No edit summary |
Jaume.Sanz (talk | contribs) No edit summary |
||
| Line 48: | Line 48: | ||
:Notice that, once the <math>\Delta \nabla B_C</math> ambiguity is fixed, thence a double-differenced measurement two orders of magnitude accurate than the code (typically) is available to navigate. This allows to achieve centimetre level of positioning accuracy. | :Notice that, once the <math>\Delta \nabla B_C</math> ambiguity is fixed, thence a double-differenced measurement two orders of magnitude more accurate than the code (typically) is available to navigate. This allows to achieve centimetre level of positioning accuracy. | ||
Revision as of 16:16, 1 February 2012
| Fundamentals | |
|---|---|
| Title | Carrier phase ambiguity fixing with two frequencies |
| Author(s) | J. Sanz Subirana, J.M. Juan Zornoza and M. Hernández-Pajares, Technical University of Catalonia, Spain. |
| Level | Advanced |
| Year of Publication | 2011 |

- A simple approach for ambiguity fixing is presented briefly as follows [footnotes 1]:
- Wide-lane ambiguity fixing: The double-differenced wide-lane ambiguity [math]\displaystyle{ \Delta \nabla N_W }[/math] can be computed from the Melbourne Wübbena Combination, by rounding the average in time [footnotes 2] (see equations in the article Combining pairs of signals and clock definition).
- [math]\displaystyle{ \Delta \nabla N_W=\left [\frac{\Delta \nabla \Phi_{_W}-\Delta \nabla R_{_N}}{\lambda_W} \right]_{\mbox{roundoff}} \qquad \mbox{(1)} }[/math]
- Under moderate receiver noise and multipath conditions, few minutes should be enough to fix this ambiguity. This ambiguity estimate has the advantage that can be obtained separately for each measurement, i.e., the estimates for the different measurements are uncorrelated.
- L1 ambiguity fixing: After fixing [math]\displaystyle{ \Delta \nabla N_W }[/math] the double differenced L1 ambiguity ([math]\displaystyle{ \Delta \nabla N_1 }[/math]) can be fixed from the expression
- [math]\displaystyle{ \Delta \nabla N_1=\left [\frac{1}{\lambda_N}\left (\Delta \nabla \hat{B}_c \right) - \frac{\lambda_W}{\lambda_2}\Delta \nabla N_W \right]_{\mbox{roundoff}} \qquad \mbox{(2)} }[/math]
- when an estimate of the ambiguity [math]\displaystyle{ \Delta \nabla {\hat B}_C }[/math] accurate enough is available. This estimate [math]\displaystyle{ \Delta \nabla \hat{B}_C }[/math] can be computed as in the previous section (PPP), floating the [math]\displaystyle{ B_C }[/math] ambiguities in the Kalman filter.
- As the ambiguities [math]\displaystyle{ B_C }[/math] are determined "by floating" them in the navigation filter, some time span is needed (most part of one hour) for the filter to be converged. Indeed, roughly speaking, this ambiguity [math]\displaystyle{ B_C }[/math] is mostly estimated from [math]\displaystyle{ R_{_C}-\Phi_{_C} }[/math], where the [math]\displaystyle{ R_{_C} }[/math] code noise is about three times noisier than the code measurement in the frequency [math]\displaystyle{ f_1 }[/math] (see Figure 1 corresponding to GNSS Measurement features and noise).
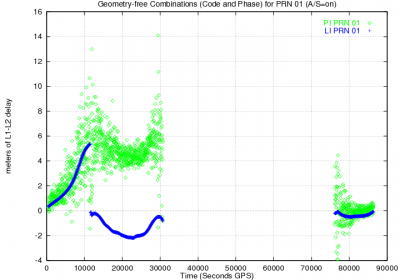
Figure 1:GPS code and carrier phase measurement features. The geometry-free combinations of code ([math]\displaystyle{ R_{_{P2}}-R_{_{P1}} }[/math]), in green, and carrier ([math]\displaystyle{ \Phi_{L_1}-\Phi_{L_2} }[/math]), in blue, are plotted as function of time for a given satellite.

- There are more sophisticated methods as the Lambda Method (see [Teunissen, 1996] [1], [Teunissen et al., 1997][2]) or the Null Space (see [Martin-Neira et al., 1995] [3]), among others [Kim and Langley, 2000] [4], where the ambiguities are fixed "as a set", and decorrelation and search (on integers) techniques are applied to enhance the ambiguity resolution.
- Ionosphere-free bias fixed: After fixing the [math]\displaystyle{ \Delta \nabla N_W }[/math] and [math]\displaystyle{ \Delta \nabla N_1 }[/math] ambiguities, the double differenced ionosphere-free bias is fixed by:
- [math]\displaystyle{ \Delta \nabla B_C=\lambda_N \left (\Delta \nabla N_1+\frac{\lambda_W}{\lambda_2}\Delta \nabla N_W \right) \qquad \mbox{(3)} }[/math]
- Notice that, once the [math]\displaystyle{ \Delta \nabla B_C }[/math] ambiguity is fixed, thence a double-differenced measurement two orders of magnitude more accurate than the code (typically) is available to navigate. This allows to achieve centimetre level of positioning accuracy.
- An alternative way to avoid the time span needed for the floated [math]\displaystyle{ \Delta \nabla {\hat B}_C }[/math] to converge is to use the following equation, for the [math]\displaystyle{ \Phi_1 }[/math] ambiguity fixing:
- [math]\displaystyle{ \Delta \nabla N_1= \left [ \frac{\Delta \nabla \Phi_1 - \Delta \nabla \Phi_2 - \Delta \nabla I- \lambda_2 \Delta \nabla N_W}{\lambda_2 -\lambda_1} \right ]_{\mbox{roundoff}} \qquad \mbox{(4)} }[/math]
- The main problem here is the ionospheric refraction term [math]\displaystyle{ \Delta \nabla I }[/math].
- For short baselines (up to [math]\displaystyle{ 10-15 }[/math] kilometres, depending on the ionospheric conditions) it can be assumed that the double-differenced ionospheric refraction cancels, i.e., [math]\displaystyle{ \Delta \nabla I\simeq 0 }[/math], and thence, the [math]\displaystyle{ \Delta \nabla N_1 }[/math] ambiguity can be fixed by rounding from the expression:
- [math]\displaystyle{ \Delta \nabla N_1=\left [\frac{\Delta \nabla \Phi_1 - \Delta \nabla \Phi_2 -\lambda_2 \Delta \nabla N_W}{\lambda_2 -\lambda_1} \right]_{\mbox{roundoff}} \qquad \mbox{(5)} }[/math]
- This is the approach applied in the RTK ambiguity fixing technique.
- For long baselines, an accurate ionospheric correction estimate [math]\displaystyle{ \Delta \nabla \widehat{I} }[/math] is needed to allow the user to fix the ambiguity by rounding from (4). Notice that, once the ambiguity [math]\displaystyle{ N_W }[/math] is fixed, being the carrier measurement noise of few millimetres, the main contribution to the rounding error is from the [math]\displaystyle{ \widehat{\Delta \nabla I} }[/math] term. Notice also that its accuracy must be better than [math]\displaystyle{ \frac{\lambda_1-\lambda_2}{2} }[/math] to allow the integer rounding. In the case of the Galileo E1 and E5b signals, this accuracy threshold is [math]\displaystyle{ \frac{\lambda_2-\lambda_1}{2}=2.9\,cm }[/math], (see Table 1in the article Carrier phase ambiguity fixing with three frequencies). For the of L1 and L2 GPS signals, it is [math]\displaystyle{ \frac{\lambda_2-\lambda_1}{2}=2.7cm }[/math], see table in the article Combination of GNSS Measurements).
The WARTK technique has been proved that accurate ionospheric corrections can be computed from the measurements gathered from permanent reference stations networks with similar baselines as SBAS (WAAS, EGNOS, …) networks. Such highly accurate ionosphere allows the carrier phase ambiguity fixing over a wide area. In this way, the WARTK technique can allow to extend the RTK ambiguity fixing from local area to wide-area, i.e., at continental scale. See more details in the following references [Hernandez-Pajares et al., 2010][5], [Hernandez-Pajares et al., 2003a] [6] and [Hernandez-Pajares et al., 2003b][7].
Notes
- ^ The next expressions can be easily derived from the equations presented in the article Combining pairs of signals and clock definition
- ^ Notice that the code noise is reduced in the narrow-lane combination [math]\displaystyle{ R_N }[/math] by a factor [math]\displaystyle{ \sqrt{2} }[/math], (see GNSS Measurement features and noise), and on the other hand the ambiguity spacing is wider in the wide-lane combination (see Combination of GNSS Measurements) and figures in the articles GNSS Measurement features and noise Detector based in code and carrier phase data: The Melbourne-Wübbena combination respectively). For instance, for Galileo E1, E5b signal, the [math]\displaystyle{ \lambda_W=0.81 \,cm }[/math] (see Table 1 in Carrier phase ambiguity fixing with three frequencies), or for the L1, L2 GPS signals the [math]\displaystyle{ \lambda_W=0.86 \,cm }[/math] (see table in Combination of GNSS Measurements).
References
- ^ [Teunissen, 1996] Teunissen, P., 1996. GPS Carrier phase ambiguity Fixing concepts, in GPS for Geodesy. Lecture Notes in Earth Sciences, Springer. pp. 263-335.
- ^ [Teunissen et al., 1997] Teunissen, P., De Jonge, P. and Tiberius, J., 1997. Performance of LAMBDA Method for Fast GPS Ambiguity Resolution. Navigation. 44(3), pp. 373-383.
- ^ [Martin-Neira et al., 1995] Martin-Neira, M., Toledo, M. and Pelaez, A., 1995. The null space method for GPS integer ambiguity resolution. Proceedings of DSNS'95, Bergen, Norway, April 24-28, Paper No. 31, 8 pp.
- ^ [Kim and Langley, 2000] Kim, D. and Langley, R. B., 2000. GPS Ambiguity Resolution and Validation: Methodologies, Trends and Issues. Proceedings of 7th GNSS Workshop - International Symposium on GPS/GNSS, Seoul, Korea, Nov. 30-Dec. 2, 2000.
- ^ [Hernandez-Pajares et al., 2010] Hernandez-Pajares, M., Juan, M., Sanz, J.,Aragon-Angel, A., Samson, J., Tossaint, M., Odijk, D., Teunissen, P.,De Bakker, P., Verhagen, S. and Van der Marel, H., 2010. Wide-Area RTK. InsideGNSS (March/April 2010). 5(2), pp. 36-46.
- ^ [Hernandez-Pajares et al., 2003a] Hernandez-Pajares, M., Juan, J., Sanz, J. and Colombo, O., 2003a. Impact of real-time ionospheric determination on improving precise navigation with Galileo and next-generation GPS. Journal of the Institute of Navigation.
- ^ [Hernandez-Pajares et al., 2003b] Hernandez-Pajares, M., Juan-Zornoza, J., Sanz-Subirana, J. and Colombo, O., 2003b. Feasibility of Wide-Area Subdecimeter Navigation With GALILEO and Modernized GPS. IEEE Transactions on Geoscience and Remote Sensing. 41(9), pp. 2128-2131.