If you wish to contribute or participate in the discussions about articles you are invited to contact the Editor
MSAS Architecture: Difference between revisions
Rui.Pereira (talk | contribs) No edit summary |
Gema.Cueto (talk | contribs) Updated to portray system merge with QZSS in 2020 |
||
| (7 intermediate revisions by 3 users not shown) | |||
| Line 1: | Line 1: | ||
{{Article Infobox2 | {{Article Infobox2 | ||
|Category=MSAS | |Category=MSAS | ||
| | |Editors=GMV | ||
|Level=Basic | |Level=Basic | ||
|YearOfPublication=2011 | |YearOfPublication=2011 | ||
| Line 7: | Line 7: | ||
|Title={{PAGENAME}} | |Title={{PAGENAME}} | ||
}} | }} | ||
The MTSAT Satellite Augmentation System ([[MSAS General Introduction|MSAS]]) is the Japanese [[SBAS General Introduction|Satellite Based Augmentation System (SBAS)]] System:<ref name="MSAS_STATUS_2007">[http://www. | The MTSAT Satellite Augmentation System ([[MSAS General Introduction|MSAS]]) is the Japanese [[SBAS General Introduction|Satellite Based Augmentation System (SBAS)]] System:<ref name="MSAS_STATUS_2007">[http://www.unoosa.org/ MSAS Current Status, Japan Civil Aviation Bureau,] [http://www.oosa.unvienna.org/oosa/SAP/gnss/icg/icg02/presentations.html Second Meeting of the International Committee on Global Navigation Satellite Systems (ICG) organized by the International Space Research Organization, Bangalore, India , 5 - 7 September 2007]</ref> a GPS Augmentation system with the goal of improving its accuracy, integrity, and availability. | ||
First tests were accomplished successfully, and MSAS system for aviation use was declared operational in September 27, 2007,<ref name="MSAS_STATUS_2007_2">QZSS / MSAS Status, CGSIC –47th Meeting ,Fort Worth, Texas September25, 2007, Satoshi KOGURE, [http://www.jaxa.jp/index_e.html Japan Aerospace Exploration Agency,] QZSS Project Team</ref><ref name="MSAS_GPSW">[http://www.gpsworld.com/surveyperspectives-late-april-2008-7289 Eric Gakstatter, Perspectives - Late April 2008, GPSworld, April 15, 2008]</ref><ref name=MSAS_WIKI_2>[http://en.wikipedia.org/wiki/Multi-functional_Satellite_Augmentation_System Multi-functional Satellite Augmentation System] in [http://en.wikipedia.org/ Wikipedia]</ref> providing a service of horizontal guidance for En-route through Non-Precision Approach.<ref name="MSAS_STATUS_2007"/><ref name="MSAS_STATUS_2007_2"/><ref name="MSAS_STATUS_2008">[http://www.unoosa.org/ Overview of MSAS, Presentation for ICG-3, 2008]</ref> | |||
First tests were accomplished successfully, and MSAS system for aviation use was declared operational in September 27, 2007,<ref name="MSAS_STATUS_2007_2"> | The SBAS signal used to be transmitted from MTSAT (Multi-functional Transport Satellites) operated by the Ministry of Land, Infrastructure, Transport and Tourism (MLIT). The SBAS signal that is made by MLIT is now transmitted from the QZS-3 GEO satellite using the QZSS SBAS transmission service since April 2020.<ref name="QZSS_SBAS">[https://qzss.go.jp/en/overview/services/sv12_sbas.html SBAS Transmission Service], QZSS Official Website</ref> | ||
==MSAS Architecture== | ==MSAS Architecture Fundamentals== | ||
MSAS works by processing GPS data collected by a network of reference stations to generate the SBAS message which is uploaded to the GEO satellites. The GEO satellites broadcast this information to the user receivers, which compute the aircraft positioning and inform on potential alert messages.<ref name="MSAS_STATUS_2008"/> | MSAS works by processing GPS data collected by a network of reference stations to generate the SBAS message which is uploaded to the GEO satellites. The GEO satellites broadcast this information to the user receivers, which compute the aircraft positioning and inform on potential alert messages.<ref name="MSAS_STATUS_2008"/> | ||
The main layers of MSAS architecture are:<ref name="MSAS_STATUS_2008"/> | The main layers of MSAS architecture are:<ref name="MSAS_STATUS_2008"/> | ||
*[[MSAS Ground Segment|MSAS Ground Segment]]: The ground segment is composed of | *[[MSAS Ground Segment|MSAS Ground Segment]]: The ground segment is composed of Ground Monitor Station (GMS) that collect information on the GPS and MSAS signals. Then, the GMS send their data to the Master Control Stations (MCS) that compute precise differential corrections and integrity bounds and send them to the MSAS satellites for rebroadcast to the User Segment. | ||
*[[MSAS Space Segment|MSAS Space Segment]]: The space segment | *[[MSAS Space Segment|MSAS Space Segment]]: The space segment is based on GEO satellites whose navigation payloads are in charge of broadcasting the correction messages generated by the Master Control Stations for reception by the User Segment. | ||
*[[MSAS User Segment|MSAS User Segment]]: The user segment is the GPS and SBAS-enabled receiver, which uses the information broadcast from each GPS satellite to determine its location and the current time, and receives the MSAS corrections from the Space Segment. | *[[MSAS User Segment|MSAS User Segment]]: The user segment is the GPS and SBAS-enabled receiver, which uses the information broadcast from each GPS satellite to determine its location and the current time, and receives the MSAS corrections from the Space Segment. | ||
== | |||
< | ==MSAS Architecture Evolution== | ||
===MSAS V1 Architecture (2007 – 2020)=== | |||
The Initial Performance Phase operated with a MTSAT, 2 Master Control Stations (MCS) and 6 Ground Monitor Stations (GMS) by 2020. <ref name="ICAO">[https://www.icao.int/Meetings/anconf13/Documents/WP/wp_249_en.pdf MSAS STATUS AND FUTURE PLAN] ICAO THIRTEENTH AIR NAVIGATION CONFERENCE, Montréal, Canada, 9 to 19 October 2018 </ref> | |||
<div><ul> | |||
<center> | |||
<li style="display: inline-block;"> [[File:MSAS_Architecture.PNG|MSAS original system.|center|thumb]] </li> | |||
<li style="display: inline-block;"> [[File:MSASV1.jpg|MSAS V1 final configuration <ref name="ICAO"/>.|center|thumb]] </li> | |||
</center> | |||
</ul></div> | |||
===MSAS V2 Architecture (2020 – 2023)=== | |||
The system update phase began with the operational takeover of the GEO QZS-3 satellite. The SBAS ground system is to be fully replaced with 2 MCS, 13 GMS and 3 Uplink Station in domestic. Performance will be the same of higher than the MSAS V1 system. <ref name="ICAO"/> | |||
[[File:MSASV2.jpg|MSAS V2 configuration <ref name="ICAO"/>.|center|thumb]] | |||
===MSAS V3 Architecture (2023 – TBD)=== | |||
The LPV Performance Phase is to begin in 2023. The objective is to achieve vertical guidance (LPV operation) by using two or more GEO satellites. High performance ionosphere correction software needs to be developed for low latitude magnetic equatorial region using the research outcome from ENRI. <ref name="ICAO"/> | |||
[[File:MSASV3.jpg|MSAS V3 configuration <ref name="ICAO"/>.|center|thumb]] | |||
===MSAS V4 Architecture (2017 – TBD)=== | |||
The DFMC Validation Phase started in 2017 with the DFMC SBAS experiment performed by ENRI using the QZS-2 satellite. The initial performance starts with LPV 200 in support of ICAO SARPs validation activity. QZS-3 and QZS-4 will be used for DFMC SBAS validation. <ref name="ICAO"/> | |||
[[File:MSASV4.jpg|MSAS V4 configuration <ref name="ICAO"/>.|center|thumb]] | |||
==References== | ==References== | ||
<references/> | <references/> | ||
[[Category:MSAS]] | [[Category:MSAS]] | ||
Latest revision as of 13:20, 29 September 2021
| MSAS | |
|---|---|
| Title | MSAS Architecture |
| Edited by | GMV |
| Level | Basic |
| Year of Publication | 2011 |

The MTSAT Satellite Augmentation System (MSAS) is the Japanese Satellite Based Augmentation System (SBAS) System:[1] a GPS Augmentation system with the goal of improving its accuracy, integrity, and availability. First tests were accomplished successfully, and MSAS system for aviation use was declared operational in September 27, 2007,[2][3][4] providing a service of horizontal guidance for En-route through Non-Precision Approach.[1][2][5] The SBAS signal used to be transmitted from MTSAT (Multi-functional Transport Satellites) operated by the Ministry of Land, Infrastructure, Transport and Tourism (MLIT). The SBAS signal that is made by MLIT is now transmitted from the QZS-3 GEO satellite using the QZSS SBAS transmission service since April 2020.[6]
MSAS Architecture Fundamentals
MSAS works by processing GPS data collected by a network of reference stations to generate the SBAS message which is uploaded to the GEO satellites. The GEO satellites broadcast this information to the user receivers, which compute the aircraft positioning and inform on potential alert messages.[5]
The main layers of MSAS architecture are:[5]
- MSAS Ground Segment: The ground segment is composed of Ground Monitor Station (GMS) that collect information on the GPS and MSAS signals. Then, the GMS send their data to the Master Control Stations (MCS) that compute precise differential corrections and integrity bounds and send them to the MSAS satellites for rebroadcast to the User Segment.
- MSAS Space Segment: The space segment is based on GEO satellites whose navigation payloads are in charge of broadcasting the correction messages generated by the Master Control Stations for reception by the User Segment.
- MSAS User Segment: The user segment is the GPS and SBAS-enabled receiver, which uses the information broadcast from each GPS satellite to determine its location and the current time, and receives the MSAS corrections from the Space Segment.
MSAS Architecture Evolution
MSAS V1 Architecture (2007 – 2020)
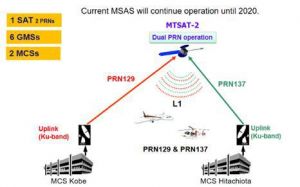
The Initial Performance Phase operated with a MTSAT, 2 Master Control Stations (MCS) and 6 Ground Monitor Stations (GMS) by 2020. [7]
-
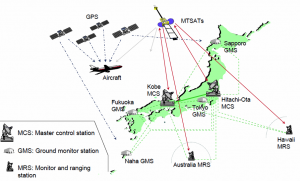
MSAS original system. -
MSAS V1 final configuration [7].


MSAS V2 Architecture (2020 – 2023)
The system update phase began with the operational takeover of the GEO QZS-3 satellite. The SBAS ground system is to be fully replaced with 2 MCS, 13 GMS and 3 Uplink Station in domestic. Performance will be the same of higher than the MSAS V1 system. [7]

MSAS V3 Architecture (2023 – TBD)
The LPV Performance Phase is to begin in 2023. The objective is to achieve vertical guidance (LPV operation) by using two or more GEO satellites. High performance ionosphere correction software needs to be developed for low latitude magnetic equatorial region using the research outcome from ENRI. [7]

MSAS V4 Architecture (2017 – TBD)
The DFMC Validation Phase started in 2017 with the DFMC SBAS experiment performed by ENRI using the QZS-2 satellite. The initial performance starts with LPV 200 in support of ICAO SARPs validation activity. QZS-3 and QZS-4 will be used for DFMC SBAS validation. [7]

References
- ^ a b MSAS Current Status, Japan Civil Aviation Bureau, Second Meeting of the International Committee on Global Navigation Satellite Systems (ICG) organized by the International Space Research Organization, Bangalore, India , 5 - 7 September 2007
- ^ a b QZSS / MSAS Status, CGSIC –47th Meeting ,Fort Worth, Texas September25, 2007, Satoshi KOGURE, Japan Aerospace Exploration Agency, QZSS Project Team
- ^ Eric Gakstatter, Perspectives - Late April 2008, GPSworld, April 15, 2008
- ^ Multi-functional Satellite Augmentation System in Wikipedia
- ^ a b c Overview of MSAS, Presentation for ICG-3, 2008
- ^ SBAS Transmission Service, QZSS Official Website
- ^ a b c d e f g h MSAS STATUS AND FUTURE PLAN ICAO THIRTEENTH AIR NAVIGATION CONFERENCE, Montréal, Canada, 9 to 19 October 2018