|
|
| Line 7: |
Line 7: |
| |YearOfPublication=2011 | | |YearOfPublication=2011 |
| }} | | }} |
| ==Introduction==
| |
| Each Galileo satellite transmits ten navigation signals in the frequency bands E1, E6, E5a and E5b, right-hand circularly polarised. These signals are designed to support four different services: Open Service (OS), Safety of Life (SoL) service, Commercial Service (CS) and Public Regulated Service (PRS). A brief description of these Galileo services is provided as follows:
| |
| * '''OS:''' The Open Service is free of charge for worldwide users. Up to three separate signal frequencies are offered within OS. Single-frequency receivers will provide performance similar to GPS C/A. In general, OS applications will use a combination of Galileo and GPS signals, which will improve performance in severe environments such as urban areas.
| |
| * '''SoL:''' The Safety-of-Life Service provides timely warnings to the users when them fails to meet certain margins of accuracy (integrity). The service will be certified for SoL users requiring integrity information (civil aviation...). Two signals are provided in the frequency bands reserved for Aeronautical Radio-Navigation Services (E1 and E5).
| |
| * '''CS:''' The Commercial Service provides access to two additional signals protected through commercial encryption (ranging data and messages). Higher data rates (up to 500 bps) for broadcasting data messages are provided.
| |
| * '''PRS:''' The Public Regulated Service is for security authorities (police, military, etc) requiring a high continuity of service, with controlled access. Under governmental control. Enhanced signal modulation/encryption is introduced to provide robustness against jamming and spoofing. Two PRS navigation signals with encrypted ranging codes and data will be available. The Galileo satellites will also be able to detect and report signals form Cospas- Sarsat Search and Rescue (SAR) beacons.
| |
|
| |
| As in the case of GPS, all satellites share the same frequencies, and the signals are differentiated by the code division multiple access CDMA<ref group="footnotes">Where the spread spectrum codes enable the satellite to transmit on the same frequencies simultaneously.</ref> technique. These signals can contain data and pilot channel. Both channels provide ranging codes, but the data channels include also navigation data. Pilot channels (or pilot tones) are data-less signals, so that no bit transition occurs, helping the tracking of weak signals. A diagram of the different Galileo signals is shown in figure 1 (from [Powe, M., 2006]) where the data and pilot channels are plotted in orthogonal planes to highlight that they are shifted by 90 degrees in phase, which allow for their separation in the receivers.
| |
| [[File:Galileo Signals in Space.png|none|thumb|400px|alt=Galileo Signals in Space|'''''Figure 1:''''' Galileo Signals in Space]]
| |
|
| |
| A brief description of each signal is provided as follows<ref group="footnotes">As Mainly extracted from OS SIS ICD.</ref>
| |
| * E1 signal supports the OS, CS and SoL service and PRS. It contains three navigation signal components in the L1 band. The first one, E1-A, is encrypted and only accessible to authorised PRS users, and it contains PRS data at ''50 bps''. The other two components, E1-B and E1-C, are open access signals with unencrypted ranging codes accessible to all users. E1- B is a data channel and E1-C a pilot (or data-less). The E1-B data stream, at ''125 bps'', also contains unencrypted integrity messages and encrypted commercial data. '''Note:''' the band E1 is shared with GPS L1.
| |
| * E6 signal is a dedicated signal for supporting the CS service and PRS. It provides three navigation signal components transmitted in the E6 band. E1, the first one, E6-A, is encrypted and only accessible to authorised PRS users, carrying PRS data. The other two, E6-B and E6-C, are commercial access signals and include a data channel E6-B and a pilot (or data-less) channel E6-C. Its ranging codes and data are encrypted. A data rate of 500 bps allows the transmission of added-value commercial data.
| |
| * E5a signal supports OS. It is an open access signal transmitted in the E5a band that includes two signal components. A data channel, E5a-I, and a pilot (or data-less) channel, E5a-Q. The E5a signal has unencrypted ranging codes and navigation data, which are accessible by all users. It transmits the basic data to support navigation and timing functions, using a relatively low ''25 bps'' data rate that enables more robust data demodulation. Note: the band E5a is shared with GPS L5.
| |
| * E5b signal supports the OS, CS and SoL services. It is an open access signal transmitted in the E5b band that includes other two signal components: The data channel E5b-I and the pilot (or data-less) channel E5b-Q. It has unencrypted ranging codes and navigation data accessible to all users. The E5b data stream also contains unencrypted integrity messages and encrypted commercial data. The data rate is ''125 bps''.
| |
| Note: the band E5b will be shared with GLONASS G3.
| |
|
| |
| The E5a and E5b signal components are modulated onto a single E5 carrier frequency 1191.795 MHz using a technique known as AltBOC. The composite of the E5a and E5b signals is denoted as the E5 signal and can be processed as a single large bandwidth signal with an appropriate user receiver implementation, which results in a low multipath and tracking noise signal.
| |
| Next table 1 shows a summary of the Galileo signals, frequencies and applied modulations. The ranging Code Rate and Data Rate are also given in the table.
| |
| [[File:Galileo Navigation Signals.png|none|thumb|400px|alt=Galileo Navigation Signals|'''''Table 1:''''' Galileo Navigation Signals. The two signals located in the E5a and E5b bands respectively are modulated onto a single E5 carrier frequency 1191.795 MHz using the AltBOC technique: AltBOC(15,10).]]
| |
|
| |
| The Galileo ranging codes are generated from primary and secondary codes, by using a tiered codes construction. Tiered codes generate a very long code that protects against interference. They are generated by multiplying a fast code (primary) by a slow code (secondary), running one chip for each epoch of the primary code. That is, tiered codes consist of successive repetitions of a primary code modulated by the chips of a secondary code. The repetitive primary codes allow faster acquisitions while the entire code is used for tracking.
| |
|
| |
| ==Galileo Navigation message==
| |
| The Galileo satellites will broadcast five types of data in four navigation messages: The Freely accessible Navigation Message (F/NAV) and Integrity Navigation Message (I/NAV), the Commercial Navigation Message (C/NAV) and the Governmental Navigation Message (G/NAV). Next table 2 summarises the content of the Galileo messages, with an indication of the associated channels and services (table inspired in [Hofmann-Wellenhof et al., 2008]). | | The Galileo satellites will broadcast five types of data in four navigation messages: The Freely accessible Navigation Message (F/NAV) and Integrity Navigation Message (I/NAV), the Commercial Navigation Message (C/NAV) and the Governmental Navigation Message (G/NAV). Next table 2 summarises the content of the Galileo messages, with an indication of the associated channels and services (table inspired in [Hofmann-Wellenhof et al., 2008]). |
| [[File:Galileo Messages.png|none|thumb|400px|alt=galileo navigation messages|'''''Table 2:''''' Content of the Galileo message types]] | | [[File:Galileo Messages.png|none|thumb|400px|alt=galileo navigation messages|'''''Table 2:''''' Content of the Galileo message types]] |
| Line 58: |
Line 34: |
|
| |
|
| [[File:Galileo Navigation Message Structure.png|none|thumb|400px|alt=Galileo Navigation Message Structure|'''''Figure 2:''''' Galileo Navigation Message Structure (from [Powe, M., 2006]).]] | | [[File:Galileo Navigation Message Structure.png|none|thumb|400px|alt=Galileo Navigation Message Structure|'''''Figure 2:''''' Galileo Navigation Message Structure (from [Powe, M., 2006]).]] |
|
| |
| ==User domain Galileo performances==
| |
| The performance requirements for the Galileo services are summarised in the next table (From [Hofmann-Wellenhof et al., 2008], based on Falcone (2006)).
| |
| [[File:Performance requirements for the Galileo services.png|none|thumb|400px|alt=Performance requirements for the Galileo services|'''''Table 4:''''' Performance requirements for the Galileo services: (1) Single frequency accuracy deepens on which frequency is used. (2) Offset Galileo to UT over 34h. (3) Receiver autonomous integrity monitoring is possible.]]
| |
|
| |
|
| ==Notes== | | ==Notes== |
| Line 71: |
Line 43: |
|
| |
|
| [[Category:Fundamentals]] | | [[Category:Fundamentals]] |
| [[Category:GALILEO Signal Structure]] | | [[Category:GALILEO]] |
 Fundamentals Fundamentals
|
| Title
|
Galileo Navigation Message
|
| Author(s)
|
J. Sanz Subirana, JM. Juan Zornoza and M. Hernandez-Pajares, University of Catalunia, Spain.
|
| Level
|
Basic
|
| Year of Publication
|
2011
|

|
The Galileo satellites will broadcast five types of data in four navigation messages: The Freely accessible Navigation Message (F/NAV) and Integrity Navigation Message (I/NAV), the Commercial Navigation Message (C/NAV) and the Governmental Navigation Message (G/NAV). Next table 2 summarises the content of the Galileo messages, with an indication of the associated channels and services (table inspired in [Hofmann-Wellenhof et al., 2008]).
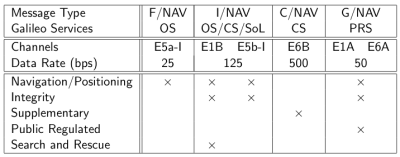
Table 2: Content of the Galileo message types
The Galileo ephemeris parameters are Keplerian-like orbital elements as in GPS (see section ??). The nominal period update is 3 hours, being valid for a 4 hours time interval. The 1-hour overlap interval is intended to help against short outages or delays. The Galileo Almanac is also similar to the GPS and GLONASS ones.
The Integrity data will provide time-alarms and parameters to compute the integrity risk to support Safety-of-Life applications.
The Supplementary data is expected to provide information to support different envisaged commercial services as differential corrections for High Precision Positioning Service, and different kind of information data as weather alerts, traffic information... The data is encrypted to control the access to authorised users by the service providers.
The Public Regulated data is under governmental control and it is devoted to the Public Regulated Service (PRS). The system will guarantee a high continuity of service with controlled access by encryption of data.
The Search and Rescue data will provide the capability to send acknowledgment SAR messages to a Beacon equipped with a suitable Galileo receiver.
The complete navigation message is transmitted on each data channel as a sequence of frames. A frame is composed of a certain number of sub-frames, and a sub-frame is composed of several pages. This arrangement allows accomplishing the three different main categories of data to be transmitted:
- Repeated at fast rate (for urgent data, such as integrity): page.
- Medium rate (like data required for warm start) : sub-frame.
- Slow rates (like data required for cold start): frame.
The page starts with a Synchronisation Word (SW) followed by the data field. 5
After the data, a Cyclic Redundancy Check (CRC) parity bits are provided to detect the reception of corrupted data. The page ends with tail bits for the Forward Error Correction (FEC) encoding.
Three levels of error coding are applied to the Galileo Message Data Stream:
- A Cyclic Redundancy Check (CRC) with error detection capabilities after recovery of the received data
- A one-half rate Forward Error Correction (FEC). Tail Bits (sequence of zeros) to allow Viterbi decoding.
- Block Interleaving on the resulting frames: provides robustness to the FEC decoding algorithm by avoiding packets of errors. This scheme allows reducing the bit error ratio in the increased data rates.
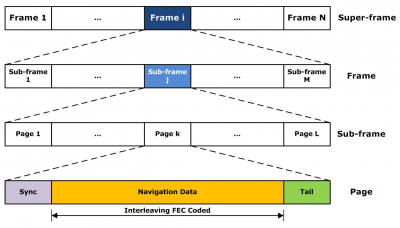
Figure 2: Galileo Navigation Message Structure (from [Powe, M., 2006]).
Notes
References
- Hofmann-Wellenhof, B., Lichtenegger, H., K. and Wasle, E., 2008. GNSS - Global Navigation Satellite Systems. Springer-Verlag, Wien, Austria.
- Powe, M., 2006. Introduction to Galileo. powerpoint presentation, progeny.


