If you wish to contribute or participate in the discussions about articles you are invited to contact the Editor
Receiver noise: Difference between revisions
Carlos.Lopez (talk | contribs) No edit summary |
Carlos.Lopez (talk | contribs) No edit summary |
||
| Line 3: | Line 3: | ||
|Title={{PAGENAME}} | |Title={{PAGENAME}} | ||
|Authors= J. Sanz Subirana, JM. Juan Zornoza and M. Hernandez-Pajares, University of Catalunia, Spain. | |Authors= J. Sanz Subirana, JM. Juan Zornoza and M. Hernandez-Pajares, University of Catalunia, Spain. | ||
|Level= | |Level=Basic | ||
|YearOfPublication=2011 | |YearOfPublication=2011 | ||
|Logo=gAGE | |Logo=gAGE | ||
Revision as of 14:49, 20 October 2011
| Fundamentals | |
|---|---|
| Title | Receiver noise |
| Author(s) | J. Sanz Subirana, JM. Juan Zornoza and M. Hernandez-Pajares, University of Catalunia, Spain. |
| Level | Basic |
| Year of Publication | 2011 |

The receiver code noise is a white-like error and can be smoothed using a low pass filter.
This error affects both the code and carrier measurements, but in different magnitude: The accuracy of pseudorange measurements is about 1% of the wavelength ("chip"), or better. This means, for instance, a noise with a maximum value of 3 m for the GPS civil C/A code and about 30 cm for the protected P codes (see table 1).However, when smoothing the code with the carrier phase, the C/A receiver noise can be reduced down to about 50 cm.
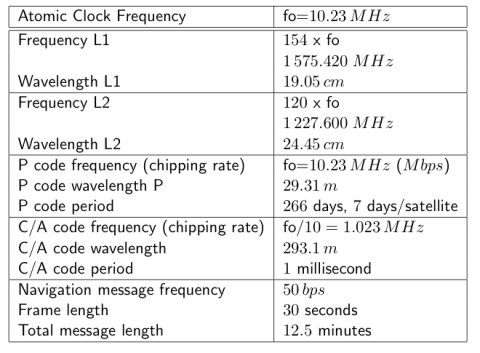
Table 1: GPS signal structure (source: G. Seeber p. 217)

The carrier phase noise is at the level of few millimetres (about the 1% of carrier phase wavelength).
Code and carrier phase noise depends on the signal strength, which varies with the elevation angle.