If you wish to contribute or participate in the discussions about articles you are invited to contact the Editor
CEP to ITRF: Difference between revisions
Jump to navigation
Jump to search
Carlos.Lopez (talk | contribs) No edit summary |
Carlos.Lopez (talk | contribs) No edit summary |
||
| Line 121: | Line 121: | ||
|+align="bottom"|''Figure 2: Polar Motion measurements (from > [Elices, T., 1991]<ref> [Elices, T., 1991] Elices, T., 1991. Introduccion a la dinamica espacial. Instituto Nacional de Tecnica Aeroespacial, Madrid, Spain.</ref>)(left) and coordinates (right)'' | |+align="bottom"|''Figure 2: Polar Motion measurements (from > [Elices, T., 1991]<ref> [Elices, T., 1991] Elices, T., 1991. Introduccion a la dinamica espacial. Instituto Nacional de Tecnica Aeroespacial, Madrid, Spain.</ref>)(left) and coordinates (right)'' | ||
| [[File: CEP_to_ ITRF_Fig_2.png |none|thumb|400px|frameless]] | | [[File: CEP_to_ ITRF_Fig_2.png |none|thumb|400px|frameless]] | ||
| [[File: CEP_to_ ITRF_Fig_3.png |none|thumb| | | [[File: CEP_to_ ITRF_Fig_3.png |none|thumb|580px|frameless]] | ||
|} | |} | ||
Revision as of 12:52, 8 August 2011
| Fundamentals | |
|---|---|
| Title | CEP to ITRF |
| Author(s) | J. Sanz Subirana, JM. Juan Zornoza and M. Hernandez-Pajares, University of Catalunia, Spain. |
| Level | Basic |
| Year of Publication | 2011 |

To transform the coordinates from CEP to ITRF it is necessary to correct the polar motion and the sidereal time (because CEP is a non-rotating system while ITRF is tied to the Earth's rotation). Therefore the basic formula to apply is:
- [math]\displaystyle{ {\mathbf r}_{ITRF}={\mathbf R}_M\; {\mathbf R}_S\; {\mathbf r}_{CEP} \qquad \mbox{(1)} }[/math]
In this case, the computation is easier, Figure 1 shows the needed steps to change from CEP to ITRF.
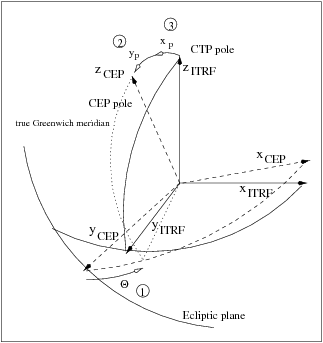
Figure 1: CEP to ITRF transformation.

- Diurnal rotation matrix: [math]\displaystyle{ {\mathbf R}_S }[/math]
- This matrix defines a rotation around the CEP pole of angle [math]\displaystyle{ \Theta_{_G} }[/math]. That is:
- [math]\displaystyle{ {\mathbf R}_S={\mathbf R}_3(\Theta_{_G})=\left[ \begin{array}{ccc} \cos \Theta_{_G} & \sin \Theta_{_G} & 0 \\ -\sin \Theta_{_G} & \cos \Theta_{_G} & 0 \\ 0 & 0 & 1 \end{array} \right] \qquad \mbox{(2)} }[/math]
- where [math]\displaystyle{ \Theta_{_G} }[/math] is the Greenwich Apparent (=true) Sidereal Time (GAST) [footnotes 1] of date, which is given by:
- [math]\displaystyle{ \Theta_{_G}=\theta_{_G} +\alpha _E \qquad \mbox{(3)} }[/math]
- where [math]\displaystyle{ \theta_{_G} }[/math] is the Greenwich Mean Sidereal Time [footnotes 2] (GMST) and [math]\displaystyle{ \alpha_E }[/math] is the equinox equation at the observation time [math]\displaystyle{ UT1 }[/math], where [footnotes 3]:
- [math]\displaystyle{ \theta_{_G}=1.002737909350795\cdot UT1+\theta_{G_0} \qquad \mbox{(4)} }[/math]
- being [math]\displaystyle{ \theta_{G_0} }[/math] the GMST at [math]\displaystyle{ 0^h }[/math] UT1:
- [math]\displaystyle{ \theta_{G_0}=6^h41^m 50^s_{\cdot}54841+8640184_{\cdot}^s812866\,T_u+0_{\cdot}^s093104\,T_u^2-6^s_{\cdot}2 \, 10^{-6}\, T_u^3 \qquad \mbox{(5)} }[/math]
- with [math]\displaystyle{ T_u }[/math] expressed in centuries of Julian UT1 date:
- [math]\displaystyle{ T_u=\displaystyle \frac{(\mbox{Julian } UT1 \mbox{ date})-2\,451\,545.0}{36\,525} \qquad \mbox{(6)} }[/math]
- The [math]\displaystyle{ \alpha_E }[/math] is the difference between the hour angle of the true equinox ([math]\displaystyle{ \gamma_{_T} }[/math]) of date and the mean equinox ([math]\displaystyle{ \gamma_{_M} }[/math]) of date [footnotes 4], difference which is due to the nutation of earth and can be computed from:
- [math]\displaystyle{ \alpha _E=\tan ^{-1}\left( \frac{{\mathbf N}_{12}}{{\mathbf N}_{11}}\right) \qquad \mbox{(7)} }[/math]
- where [math]\displaystyle{ {\mathbf N}_{ij} }[/math] is the component of the row [math]\displaystyle{ i }[/math] and column [math]\displaystyle{ j }[/math] of the Nutation Matrix (8) (see ICRF to CEP). Note that the sidereal time (GAST or GMST) is always measured from \underline{true Greenwich meridian}.
- [math]\displaystyle{ \begin{array}{c} \begin{array}{c} {\mathbf N}={\mathbf R}_{1}\left( -(\varepsilon +\Delta \varepsilon )\right) \; {\mathbf R}_{3}\left( -\Delta \psi \right) \; {\mathbf R}_{1}\left( \varepsilon \right) = \end{array}\\ \\ \begin{array}{c} =\left[ \begin{array}{ccc} 1 & 0 & 0 \\ 0 & \cos -(\varepsilon +\Delta \varepsilon ) & \sin -(\varepsilon +\Delta \varepsilon ) \\ 0 & -\sin -(\varepsilon +\Delta \varepsilon ) & \cos -(\varepsilon +\Delta \varepsilon ) \end{array} \right] \; \left[ \begin{array}{ccc} \cos -\Delta \psi & \sin -\Delta \psi & 0 \\ -\sin -\Delta \psi & \cos -\Delta \psi & 0 \\ 0 & 0 & 1 \end{array} \right] \; \left[ \begin{array}{ccc} 1 & 0 & 0 \\ 0 & \cos \varepsilon & \sin \varepsilon \\ 0 & -\sin \varepsilon & \cos \varepsilon \end{array} \right] = \\ \\ \\ =\left[ \begin{array}{ccc} \cos \Delta \psi & -\cos \varepsilon \; \sin \Delta \psi & -\sin \varepsilon \; \sin \Delta \psi \\ -\cos (\varepsilon +\Delta \varepsilon )\; \sin \Delta \psi & \begin{array}{c} \cos (\varepsilon +\Delta \varepsilon )\; \cos \varepsilon \; \cos \Delta \psi - \\ -\sin (\varepsilon +\Delta \varepsilon )\; \sin \varepsilon \end{array} & \begin{array}{c} \cos (\varepsilon +\Delta \varepsilon )\; \sin \varepsilon \; \cos \Delta \psi + \\ +\sin (\varepsilon +\Delta \varepsilon )\; \cos \varepsilon \end{array} \\ \sin (\varepsilon +\Delta \varepsilon )\; \sin \Delta \psi & \begin{array}{c} -\sin (\varepsilon +\Delta \varepsilon )\; \cos \varepsilon \; \cos \Delta \psi + \\ +\cos (\varepsilon +\Delta \varepsilon )\; \sin \varepsilon \end{array} & \begin{array}{c} -\sin (\varepsilon +\Delta \varepsilon )\; \sin \varepsilon \; \cos \Delta \psi + \\ +\cos (\varepsilon +\Delta \varepsilon )\; \cos \varepsilon \end{array} \end{array} \right] \\ \end{array} \end{array} \qquad \mbox{(8)} }[/math]
- Polar Motion Matrix: [math]\displaystyle{ {\mathbf R}_M }[/math]
- This matrix is given by two elemental rotations, [math]\displaystyle{ {\mathbf R}_1(-y_p) }[/math] and [math]\displaystyle{ {\mathbf R}_2(-x_p) }[/math] around the [math]\displaystyle{ x }[/math] and [math]\displaystyle{ y }[/math] axis, respectively. With these rotations the CEP pole is matched into the CTP pole:
- [math]\displaystyle{ {\mathbf R}_M={\mathbf R}_2(-x_p)\; {\mathbf R}_1(-y_p) \qquad \mbox{(9)} }[/math]
- where [math]\displaystyle{ x_p }[/math] and [math]\displaystyle{ y_p }[/math] define the position of the CEP with respect to the CTP (see figure 2, at right side).
- The [math]\displaystyle{ x_p }[/math], [math]\displaystyle{ y_p }[/math] pole displacements between 1961 and 1964 are shown in figure 2, at left side.
- Because of the polar movement is quite unpredictable the [math]\displaystyle{ x_p }[/math], [math]\displaystyle{ y_p }[/math] displacements are estimated from observations and provided by the IERS as mentioned before. These values can be obtained the from the Earth Rotation Parameters files provided by the IERS or JPL.
Figure 2: Polar Motion measurements (from > [Elices, T., 1991][1])(left) and coordinates (right) 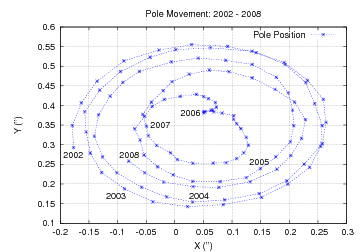
frameless 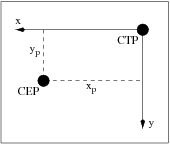
frameless


Speed Transformation
According to the previous explanations it follows:
- [math]\displaystyle{ {\mathbf r}_{ITRF}={\mathbf R}_1(-y_p)\; {\mathbf R}_2(-x_p)\; {\mathbf R}_3(\Theta_{_G})\; {\mathbf r}_{CEP} \qquad \mbox{(10)} }[/math]
The transformation for the velocity is found differentiating the equation (10) respect to time:
- [math]\displaystyle{ \begin{array}{c} {\mathbf v}_{ITRF}= {\mathbf R}_1(-y_p)\; {\mathbf R}_2(-x_p)\; \left[ \frac \partial {\partial t}\left( {\mathbf R}_3(\Theta_{_G})\right) \; {\mathbf r}_{CEP}+ {\mathbf R}_3(\Theta_{_G})\; \frac \partial {\partial t}\left( {\mathbf r}_{CEP}\right) \right] = \\ ={\mathbf R}_1(-y_p)\; {\mathbf R}_2(-x_p)\; \left[ \dot{\Theta}_{_G}\; {\stackrel{.}{\mathbf R}}_3(\Theta_{_G})\; {\mathbf r}_{CEP}+{\mathbf R}_3(\Theta_{_G})\; {\mathbf v}_{CEP}\right] \end{array} \qquad \mbox{(11)} }[/math]
Where [math]\displaystyle{ \stackrel{.}{\Theta}_{_G} }[/math] is the earth revolution rate:
- [math]\displaystyle{ \stackrel{.}{\Theta}_{_G}=\frac{2\, \pi }{\left( 24\; 3600-236\right) }\left[ rad/s\right] \qquad \mbox{(12)} }[/math]
Notes
- ^ That is, the hour angle of the true equinox, from Greenwich meridian.
- ^ The hour angle of the mean equinox of date, from Greenwich meridian.
- ^ The ratio of universal to sidereal times 1.002737909350795 can be approximately computed as the ratio between [math]\displaystyle{ 24^h }[/math] and [math]\displaystyle{ 24^h-3^m56^s }[/math]. A very accurate value is [math]\displaystyle{ =1.002737909350795+5.9006\,10^{-11}T_u-5.9\,,10^{-15}T_u^2 }[/math].
- ^ That is, between the GAST and GMST. This difference is called Equation of Equinoxes.
References
- ^ [Elices, T., 1991] Elices, T., 1991. Introduccion a la dinamica espacial. Instituto Nacional de Tecnica Aeroespacial, Madrid, Spain.