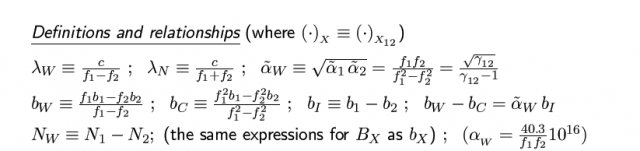
According to the equations described in the [[Combining pairs of signals and clock definition|combination of pairs of signals]]
According to the equations described in the [[Combining pairs of signals and clock definition|combination of pairs of signals]]
::[[File: Comb_Pairs_Sign_Fig_1.png|none|640px]]
::[[File: Comb_Pairs_Sign_Fig_1.png|none|640px]]
::[[File: Comb_Pairs_Sign_Fig_2.png|none|640px]]
::[[File: Comb_Pairs_Sign_Fig_2.png|none|640px]]
Line 32:
Line 33:
Following the same procedure as in [[Code Based Positioning (SPP)]], the linear observation model <math>{\mathbf Y}={\mathbf G}\;{\mathbf X}</math> for the code and carrier measurements can be written as:
Following the same procedure as in [[Code Based Positioning (SPP)]], the linear observation model <math>{\mathbf Y}={\mathbf G}\;{\mathbf X}</math> for the code and carrier measurements can be written as:
* '''Prefit-residuals:'''
* '''Prefit-residuals:'''
:<math>
:<math>
Line 74:
Line 77:
* '''Design matrix'''
* '''Design matrix'''
:<math>
:<math>
Revision as of 14:00, 5 August 2011
Fundamentals
Title
Linear observation model for PPP
Author(s)
J. Sanz Subirana, JM. Juan Zornoza and M. Hernandez-Pajares, University of Catalunia, Spain.
where [math]\displaystyle{ R^j_{_C} }[/math] is the unsmoothed code pseudorange measurement for the [math]\displaystyle{ j-th }[/math] satellite in view and [math]\displaystyle{ \Phi^j_{_C} }[/math] is the corresponding carrier measurement.
Following the same procedure as in Code Based Positioning (SPP), the linear observation model [math]\displaystyle{ {\mathbf Y}={\mathbf G}\;{\mathbf X} }[/math] for the code and carrier measurements can be written as:
the tropospheric delay in the equation (2) can be decomposed into a nominal term [math]\displaystyle{ T_0(E) }[/math] and the deviation from this nominal [math]\displaystyle{ M_{wet}(E)\,\Delta T_{z,wet} }[/math]. That is:
The mapping factor [math]\displaystyle{ M_{wet}(E) }[/math] is an element of the design matrix (5) and the [math]\displaystyle{ \Delta T_{z,wet} }[/math] is a component of the parameters vector (6):