If you wish to contribute or participate in the discussions about articles you are invited to contact the Editor
Receiver noise: Difference between revisions
Carlos.Lopez (talk | contribs) Created page with "{{Article Infobox2 |Category=Fundamentals |Title={{PAGENAME}} |Authors= J. Sanz Subirana, JM. Juan Zornoza and M. Hernandez-Pajares, University of Catalunia, Spain. |Level=Medium..." |
Carlos.Lopez (talk | contribs) No edit summary |
||
| (7 intermediate revisions by 2 users not shown) | |||
| Line 1: | Line 1: | ||
{{Article Infobox2 | {{Article Infobox2 | ||
|Category=Fundamentals | |Category=Fundamentals | ||
|Authors=J. Sanz Subirana, J.M. Juan Zornoza and M. Hernández-Pajares, Technical University of Catalonia, Spain. | |||
|Level=Basic | |||
|YearOfPublication=2011 | |||
|Title={{PAGENAME}} | |Title={{PAGENAME}} | ||
}} | }} | ||
The receiver code noise is a white-like error and can be smoothed using a low pass filter. | The receiver code noise is a white-like error and can be smoothed using a low pass filter. | ||
This error affects both the code and carrier measurements, but in different magnitude: | This error affects both the code and carrier measurements, but in different magnitude: | ||
The accuracy of pseudorange measurements is about | The accuracy of pseudorange measurements is about 1% of the wavelength ("chip"), or better. This means, for instance, a noise with a maximum value of 3 m for the GPS civil C1-code (i.e., C/A-code) and about 30 cm for the protected P codes (see table 1).However, when smoothing the code with the carrier phase, the C1-code noise can be reduced down to about 50 cm. | ||
::[[File: Signal_Structure_Table.png |none|480px| '''''Table 1: GPS signal structure (source: G. Seeber p. 217)]] | |||
::[[File: Signal_Structure_Table.png |thumb|none|480px| '''''Table 1: GPS signal structure (source: G. Seeber p. 217)]] | |||
| | ||
The carrier phase noise is at the level of few millimetres (about the | |||
The carrier phase noise is at the level of few millimetres (about the 1% of carrier phase wavelength). | |||
Code and carrier phase noise depends on the signal strength, which varies with the elevation angle. | Code and carrier phase noise depends on the signal strength, which varies with the elevation angle. | ||
[[Category:Fundamentals]] | [[Category:Fundamentals]] | ||
[[Category:GNSS Measurements and Data Preprocessing]] | |||
[[Category:Receivers]] | |||
Latest revision as of 10:35, 23 February 2012
| Fundamentals | |
|---|---|
| Title | Receiver noise |
| Author(s) | J. Sanz Subirana, J.M. Juan Zornoza and M. Hernández-Pajares, Technical University of Catalonia, Spain. |
| Level | Basic |
| Year of Publication | 2011 |

The receiver code noise is a white-like error and can be smoothed using a low pass filter.
This error affects both the code and carrier measurements, but in different magnitude: The accuracy of pseudorange measurements is about 1% of the wavelength ("chip"), or better. This means, for instance, a noise with a maximum value of 3 m for the GPS civil C1-code (i.e., C/A-code) and about 30 cm for the protected P codes (see table 1).However, when smoothing the code with the carrier phase, the C1-code noise can be reduced down to about 50 cm.
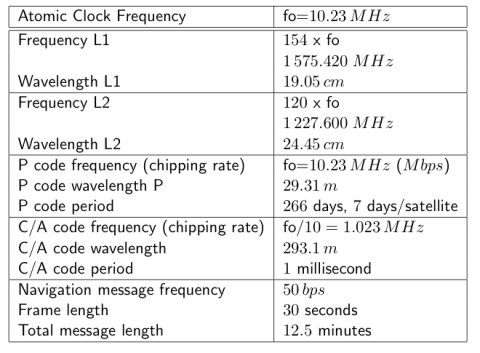
Table 1: GPS signal structure (source: G. Seeber p. 217)

The carrier phase noise is at the level of few millimetres (about the 1% of carrier phase wavelength).
Code and carrier phase noise depends on the signal strength, which varies with the elevation angle.