If you wish to contribute or participate in the discussions about articles you are invited to contact the Editor
Differential GPS: Difference between revisions
Jump to navigation
Jump to search
Rui.Pereira (talk | contribs) mNo edit summary |
Carlos.Lopez (talk | contribs) No edit summary |
||
| Line 8: | Line 8: | ||
}} | }} | ||
Differential GPS (DGPS) is a kind of [[GNSS Augmentation]] system based on an enhancement to primary GPS constellation information by the use of a network of ground-based reference stations which enable the broadcasting of differential information to the user – also named rover – to improve the accuracy of his position – the integrity is not assured | Differential GPS (DGPS) is a kind of [[GNSS Augmentation]] system based on an enhancement to primary GPS constellation information by the use of a network of ground-based reference stations which enable the broadcasting of differential information to the user – also named rover – to improve the accuracy of his position – the integrity is not assured <ref group="nb">Although Integrity is not assured,it is worth to mention,however, that there is an improve of ''integrity'' in the terms of reduction of of the probability that a GPS user would suffer from an unacceptable position error attributable to an undetected system fault (being Integrity the probability that the displayed position is within the specified or expected error boundaries) </ref> | ||
The Differential GNSS techniques and systems are explained in detail in the articles: | The Differential GNSS techniques and systems are explained in detail in the articles: | ||
| Line 20: | Line 21: | ||
==Notes== | ==Notes== | ||
<references group=" | <references group="nb"/> | ||
==References== | ==References== | ||
Revision as of 08:52, 26 October 2011
| GPS | |
|---|---|
| Title | Differential GPS |
| Author(s) | GMV |
| Level | Basic |
| Year of Publication | 2011 |

Differential GPS (DGPS) is a kind of GNSS Augmentation system based on an enhancement to primary GPS constellation information by the use of a network of ground-based reference stations which enable the broadcasting of differential information to the user – also named rover – to improve the accuracy of his position – the integrity is not assured [nb 1]
The Differential GNSS techniques and systems are explained in detail in the articles:
The case of DGPS is the same as DGNSS but using only measurements from the GPS constellation.

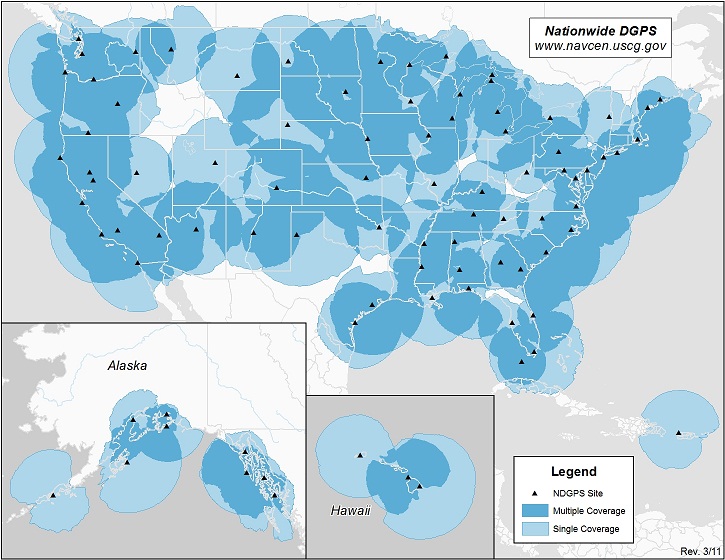
U.S. DGPS COVERAGE
Notes
- ^ Although Integrity is not assured,it is worth to mention,however, that there is an improve of integrity in the terms of reduction of of the probability that a GPS user would suffer from an unacceptable position error attributable to an undetected system fault (being Integrity the probability that the displayed position is within the specified or expected error boundaries)