If you wish to contribute or participate in the discussions about articles you are invited to contact the Editor
Differential GPS: Difference between revisions
Jump to navigation
Jump to search
No edit summary |
No edit summary |
||
| Line 8: | Line 8: | ||
}} | }} | ||
Differential GPS ( | Differential GPS (DGPS) is a kind of [[GNSS Augmentation]] system based on an enhancement to primary GPS constellation information by the use of a network of ground-based reference stations which enable the broadcasting of differential information to the user – also named rover – to improve the accuracy of his position – the integrity is not assured. | ||
The Differential GNSS tecniques and systems are explained in detail in the articles: | The Differential GNSS tecniques and systems are explained in detail in the articles: | ||
*[[Work in Progress:Differential GNSS|Differential GNSS | *[[Work in Progress:Differential GNSS|Differential GNSS (DGNSS)]]. | ||
*[[Work in Progress:Real Time Kinematic|Real Time Kinematic (RTK)]] | *[[Work in Progress:Real Time Kinematic|Real Time Kinematic (RTK)]]. | ||
*[[Work in Progress:Wide Area RTK|Wide Area RTK (WARTK)]]. | *[[Work in Progress:Wide Area RTK|Wide Area RTK (WARTK)]]. | ||
Revision as of 14:49, 8 June 2011
| GPS | |
|---|---|
| Title | Differential GPS |
| Author(s) | GMV |
| Level | Basic |
| Year of Publication | 2011 |

Differential GPS (DGPS) is a kind of GNSS Augmentation system based on an enhancement to primary GPS constellation information by the use of a network of ground-based reference stations which enable the broadcasting of differential information to the user – also named rover – to improve the accuracy of his position – the integrity is not assured.
The Differential GNSS tecniques and systems are explained in detail in the articles:
The case of DGPS is the same as DGNSS but using only measurements from the GPS constellation.

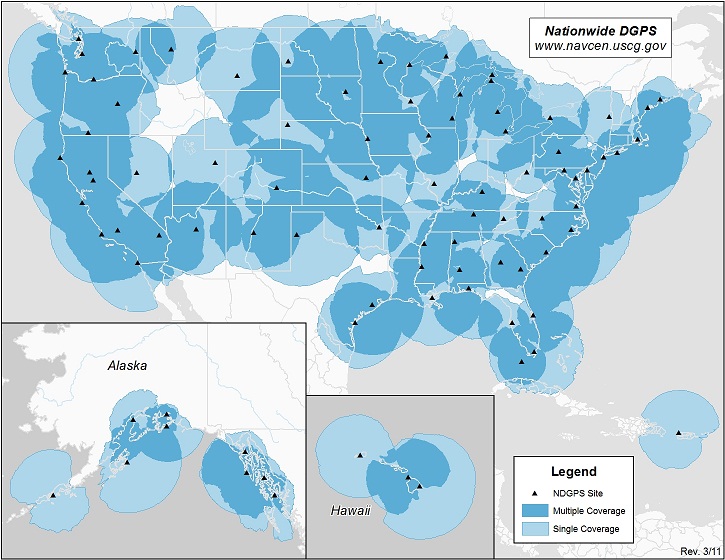
U.S. DGPS COVERAGE
Notes